The Counter
30,220
Completed package processes. Bob is the only one here with high-confidence evidence.
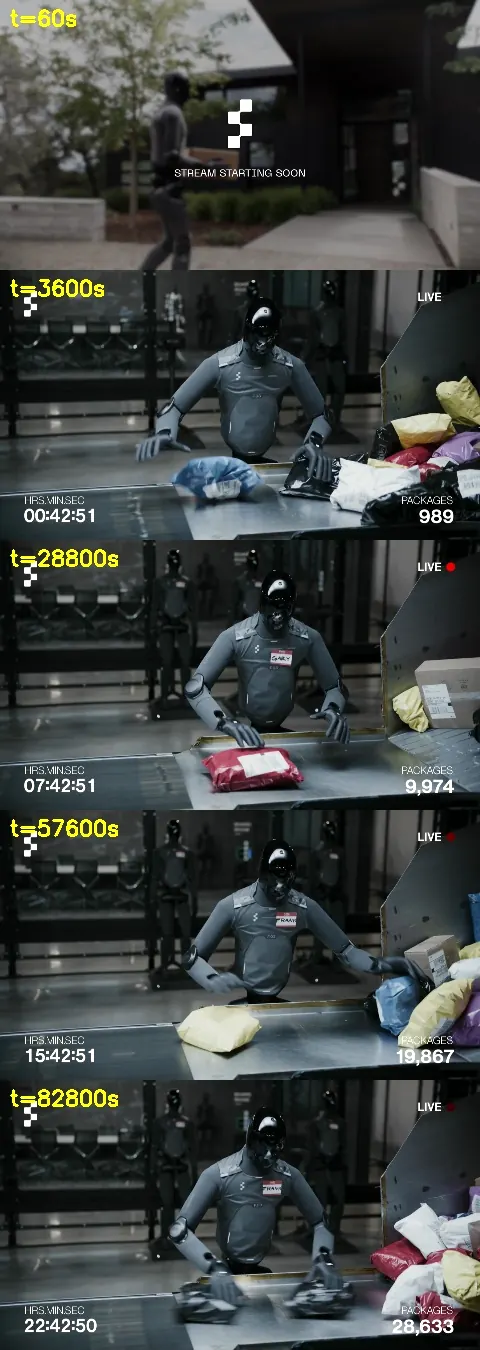
Figure AI package-flipping broadcast
A 24-hour robot shift, reduced to the important questions: how many packages, which hand did the work, and how often did the machines have to do that tiny awkward regrab thing.
The package total comes from the on-screen counter and is high confidence. Hand splits and regrabs are sampled estimates for fun, not official Figure AI data.
The names are ours. The work was real. The hand counts are estimated from sampled contact sheets, then scaled to the final package counter.
Completed package processes. Bob is the only one here with high-confidence evidence.
Estimated right-hand initiations. Gary probably did the most starting work.
Estimated left-hand initiations. Frank had a quieter but very real shift.
When one hand was not enough, Rose entered the chat.
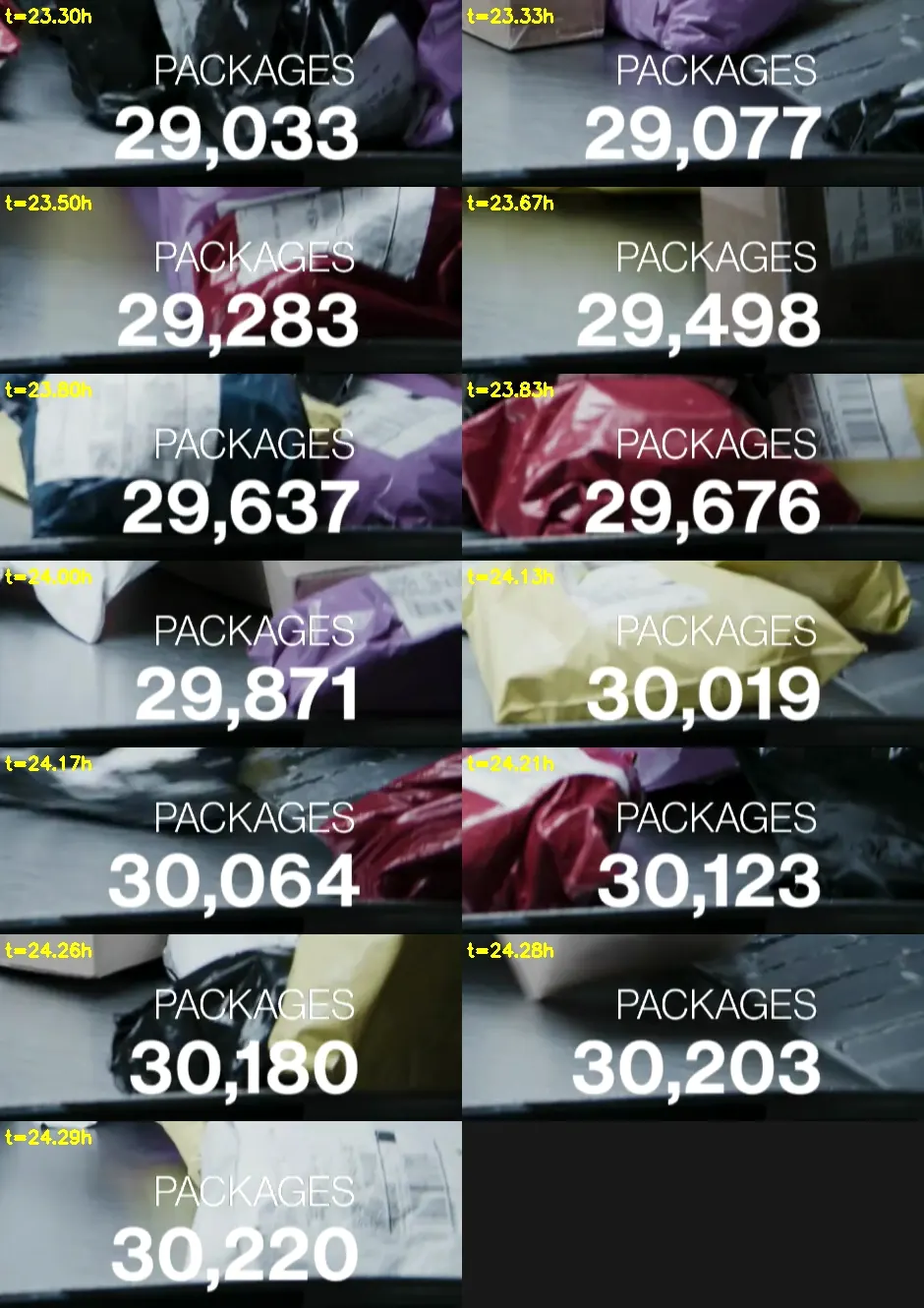
Manual visual reads of the on-screen package counter. The line is boring in the best possible way: steady work for basically the whole replay.
Rhythm
| Full replay average | 2.89 sec/package |
|---|---|
| Post-ramp average | 2.85 sec/package |
| Median hourly rhythm | 2.87 sec/package |
| Fastest hour | ~1,372 packages/hour |
| Slowest hour | ~1,164 packages/hour |
| Estimated corrective contacts | ~5,000 |
Approximate replay-relative timestamps pulled from the counter trend and spot checks.
Production starts looking real. Counter is readable at 49.
Ten-thousand package territory. The robot is still calmly doing the thing.
Twenty-thousand package territory. No major long stoppage visible from the hourly counter trend.
Approximate package number 30,000.
Final readable counter: 30,220.

A busy sampled burst around hour nine. This is where some of the hand-use and regrab estimates came from.
Final counter verification sheet.

Hourly counter crops used to chart the climb.
The on-screen package counter is the trusted stat. Everything else uses sampled visual windows because a 24-hour robot video has occlusion, motion blur, and plenty of moments where a hand is mostly hidden behind cardboard.
Method in plain English
We parsed the X/Periscope replay, sampled high-resolution frames across the shift, read the package counter at regular intervals, and used twelve 30-second contact sheets to estimate hand initiations, two-hand assists, visible successes, and corrective regrabs.
Translation: Bob is solid. Gary, Frank, and Rose are fun estimates with caveats.